

1. 서 론
2. 시추 궤도 선정
3. 분포하중 모델
3.1 분포하중 모델의 개요
3.2 다양한 구간에서의 토크와 드래그
3.3 분포하중을 이용한 시추 궤도 설계
4. 연구결과 및 해석
4.1 시추 궤도 정보
4.2 연구해석 결과
5. 결 론
1. 서 론
방향성 시추는 저류층의 노출 단면적의 증가, 투과도 높은 영역을 연결(자연균열), 얇은 층의 생산을 가속화(Garrouch et al., 2004)등 과 같은 장점이 있기 때문에 비전통자원(unconventional) 개발을 위해 많이 사용되고 있다. 방향성 시추에 대한 계획을 세우기 위해서는 지층 정보, 시추공 크기, 케이싱 유무, 토크와 드래그 분석, 장비의 성능 등을 파악(Joao, 2009)하여야 한다. 이러한 방향성 시추의 궤도에서 수직으로 진행되던 드릴스트링이 처음으로 방향성을 띄는 지점을 킥오프 지점(kick-off point, KOP)이라고 하며 킥오프 지점이 목표지점과 가까워지면 짧은 구간에서 큰 각도로 시추 궤도가 변화되기 때문에, 과도한 토크(torque)와 드래그(drag)가 발생하게 된다(최종근, 2011). 과도한 토크(torque)와 드래그(drag)는 시추공의 항적이 개의 뒷다리와 같이 갑자기 방향이 변화되는 도그-래그(DLS, dog-leg severity)현상 및 드릴스트링(drillstring)의 드릴칼라(drill collar)나 다른 기구에 의해서 시추 공벽에 홈이 생기는 키 씨팅(key-seating) 현상 등을 야기시키며 시추 장비와 케이싱(casing)이 파손될 경우에는 시추 경비의 막대한 증가를 초래하기(Choi, 1990) 때문에, 적절한 킥오프 지점을 선정하여 시추 궤도 내의 분포하중을 줄이는 것은 매우 중요하다. Johancsik 등(1984)은 시추 궤도상에서 운동 마찰력(sliding friction force)에 의해 토크와 드래그가 발생한다는 것을 파악하여, 토크와 드래그 값을 예상 및 측정하는 방법에 대해서 연구하였다. Aadnoy와 Anderson(2001)은 다양한 시추 궤도에서 분포하는 하중의 크기를 계산할 수 있는 모델을 제시하여 시추 궤도의 구간 별 분포하중의 크기를 파악하였고, Ismayilov(2012)는 분포하중모델을 이용하여 3차원의 시추 궤도상에서의 분포하중을 계산하였으며 Frafjord(2013)는 분포하중 모델을 실제 시추 자료를 이용한 해석에 사용하여 문제점 및 한계점을 파악하였다. 본 연구에서는 시추 궤도의 경사각에 대한 제한조건을 설정하여 시추 궤도의 경사범위를 설정하였고, 목표지점은 고정한 채, 킥오프 지점의 심도가 100m, 200m, 300m로 변하는 시추 궤도를 선정하였다. 분포하중 모델을 이용하여 선정된 시추 궤도 내의 토크와 드래그 값을 계산하였다. 그리고 계산된 분포하중 값을 비교 분석하여 분포하중이 최소로 발생하는 최적의 시추 궤도를 선정하였다.
2. 시추 궤도 선정
본 연구에서는 하나의 목표지점을 설정하고, 킥오프 지점, 케이싱 유무 그리고 이수의 종류를 시추 궤도의 고려 변수로 선정하였다. 킥오프 지점은 수직구간 및 곡률구간의 길이를 결정하고 케이싱은 유무에 따라 분포하중에 영향을 끼치는 마찰계수에 영향을 끼치며 그리고 이수는 종류에 따라 마찰계수와 시추 궤도의 설정이 가능한 최대 경사를 결정하는 변수이다. 시추 궤도는 킥오프 지점이 각각 100m, 200m, 300m인 세 가지 경우의 시추 궤도를 설정하였고, 각 경우에 대하여 상향 및 하향 경사범위에 적합한 세 가지 경사를 설정하여 선정된 총 9가지 시추 궤도에 대한 분포하중에 대한 분석을 실시하였다. 궤도의 최대 경사는 클롱의 마찰식에 의한 드릴스트링의 하향 조건(cos(α) ≥ μsin(α))을 만족하며, Eq. (1)과 같이 정리할 수 있다.
여기서, αmaximum : 최대 경사(maximum inclination)
μ : 마찰계수(friction factor)
일반적인 빌드-홀드(Build-hold) 형태의 시추 궤도에서는 드릴스트링의 트리핑 아웃 상황에서 분포하중이 많이 발생하기 때문에 드릴스트링이 상향할 때, 최소의 드래그가 발생하는 경사를 최소의 경사로 고려하여야 하며, 그에 따른 조건식은 Eq. (2)와 같다.
여기서, α : 최소 경사(minimum inclination)
wBHA : BHA(bottom hole assembly)의 단위 중량 (unit weight of BHA)
LBHA : BHA의 길이(length of BHA)
wDP : 시추관 단위 중량(unit weight of drill pipe)
LDP : 시추관 길이(length of drill pipe)
R : 곡률 반경(radius of curvature)
위의 조건식은 사용 이수에 따른 마찰계수, 드릴스트링과 BHA의 길이와 단위중량, 곡률반경, 킥오프 지점에 영향을 받으며, 최대와 최소 경사 범위에 해당하는 경사를 설정하여 분포하중 분석을 실시하였다.
3. 분포하중 모델
3.1 분포하중 모델의 개요
시추 궤도 내의 드릴스트링에 분포하는 하중의 크기는 드래그와 토크에 의해 결정된다(Lee et al., 2009). 드래그는 드릴스트링을 올리거나 내리는 트리핑(tripping) 과정에서 드릴스트링, 시추공벽, 시추이수 사이의 마찰에 의해서 발생하고, 토크는 시추과정에서 순수한 비트의 회전에 의해서 발생한다. 다양한 시추 궤도 형태에 대한 분포하중을 알기 위해서는 분포하중에 대한 기본적인 원리에 대해서 알아야 한다. 분포하중 모델은 기본적으로 드릴스트링이 유정(well)의 형상을 따라 변형하면서, 시추공과 드릴스트링 사이에서 연속적인 접촉면을 가지고 있다고 가정(Ismayilov, 2012)하는 Soft string 모델과 쿨롱의 마찰식을 따른다. 가장 기본적인 식이 되는 홀드-구간(hold section)에서의 트리핑(tripping)과정에서 드릴스트링에 발생하는 드래그는 Eq. (3)과 같이 표현된다.
여기서, F2 : 구간 상단에서의 힘(force at top of section)
F1 : 구간 하단에서의 힘(force at bottom of section)
w : 시추관의 단위중량(drill pipe unit weight)
△s : 측정된 구간의 길이(measured length along hole section)
α : 시추 궤도의 경사(inclination of well trajectory)
μ : 마찰계수(friction factor)
괄호의 첫 번째 항은 드릴스트링의 미끄러지는 힘, 두 번째 항은 마찰력을 뜻한다. 또한 괄호안의 부호는 ‘+’는 드릴스트링의 상향, ‘-’는 하향을 나타낸다. 시추관의 축 하중은 경사와 관계없이 단위 중량과 예상높이의 곱과 같다는 것을 준수해야 한다(Aadnoy et al., 1999). 드릴스트링에서 발생하는 드래그는 중력의 반대 방향으로 발생하는 수직항력(normal force)과 마찰계수에 비례한다. 마찰계수는 사용하는 이수의 종류와 케이싱의 유무에 따라서 달라지며, 0.1~0.6 사이의 값을 가진다(Table 1). 그리고 수직항력은 드릴스트링의 단위 중량과 시추 궤도상의 지층의 거칠기에 따라 다른 값을 나타낸다. 또한 수직항력에 영향을 미치는 드릴스트링의 단위 중량은 드릴스트링이 시추공 내에서 정지되어 있을 때, 특정 밀도의 이수에 잠겨 있는 상태이기 때문에 이수에 따른 부력상수를 통해서 드릴스트링의 단위 중량을 보정해준다.
Table 1.
Ranges of friction factors for different fluid types and hole sections (Samuel, 2010)
여기서, β : 부력 상수(buoyancy factor)
ρo : 시추관의 외부의 이수 밀도(mud density of drill pipe outer)
Ao : 시추관의 외부 면적(area of drill pipe outer)
ρi : 시추관의 내부의 이수 밀도(mud density of drill pipe inner)
Ai : 시추관의 내부 면적(area of drill pipe inner)
ρDP : 시추관의 밀도(drill pipe density)
부력상수는 Eq. (4)와 같다. 여기서 i, o는 각각 내경과 외경을 뜻하며, Ai, Ao는 드릴스트링의 내경 면적과 외경 면적을 뜻한다. 만약에 드릴스트링의 내경과 외경에서의 이수 밀도가 같으면 부력은 Eq. (5)와 같이 나타난다.
여기서, ρMud : 이수의 밀도(mud density)
ρDP : 시추관의 밀도(drill pipe density)
최종적으로 분포하중 분석을 위한 드릴스트링의 단위중량은 Eq. (6)과 같다. Eq. (6)에 의해 보정된 드릴스트링의 단위 중량은 드릴스트링의 모든 면에 일정하다는 가정을 기반으로 유도된 수식임을 명심해야 한다.
여기서, w : 보정된 시추관의 단위중량(adjusted unit weight of drill pipe)
β : 부력 상수(buoyancy factor)
wDP : 보정 이전의 시추관의 단위 중량(not adjusted unit weight of drill pipe)
시추 작업 중 비트의 회전에 의해 발생하는 토크는 normal moment(w△sr)와 마찰계수(μ)의 곱으로 계산된다. 드릴스트링의 움직임 또는 진동에 의해서 추가적인 토크가 발생(K&M technology, 2003)하기도 하며, 기본적인 토크는 Eq. (7)과 같이 나타낸다.
여기서, T : 토크(torque)
μ : 마찰계수(friction factor)
w : 시추관의 단위중량(unit weight of drill pipe)
△s : 측정된 구간의 길이(length of drill pipe)
r : 툴조인트의 반경(radius of tool joint)
α : 시추 궤도의 경사(inclination of well trajectory)
토크는 인장력(axial force)과 회전 방향에 무관하지만, 드릴스트링의 인장과 압축, 도그-래그 현상, 시추공과 드릴스트링의 크기, 드릴스트링의 단위 중량, 경사, 윤활성 또는 마찰계수에 영향을 받는다.
3.2 다양한 구간에서의 토크와 드래그
시추 궤도의 구간 형태는 2차원의 시추 궤도에서는 경사각이 유지되는 홀드 구간, 경사각이 시작되는 시작점이 끝점보다 경사가 작은 빌드업(build-up) 구간, 반대로 끝점이 경사가 큰 드랍오프(drop-off) 구간으로 나눌 수 있고, 3차원의 시추 궤도에서 보면 동서 또는 남북 방향으로 방위각이 변하는 사이드밴드(side-bend) 구간으로도 나눌 수 있다(Aadnoy & Anderson, 2001). 실제 궤도에서는 빌드업 또는 드랍오프와 사이드밴드가 동시에 발생하여 Table 2와 같이 경사와 방위각이 동시에 변화하는 구간이 발생할 수도 있다.
Table 2.
Characterizing different sections in the 2D and 3D model (Ismayilov, 2012)
본 연구에서 분포하중 분석을 실시한 빌드-홀드 형태의 시추 궤도는 Fig. 1(a)와 같이 나타낼 수 있고, Fig. 1(a)의 시추 궤도를 분포하중 분석을 위해 구간을 나눠주면 Fig. 1(b)와 같다. 홀드 구간은 드릴 스트링의 끝부분에 설치된 BHA와 나머지 드릴스트링이 설치된 홀드 구간으로 나뉘며 발생하는 분포하중은 Eq. (1)을 통해 구하고, 드릴스트링과 드랍오프 구간과 같이 곡률이 발생하는 구간은 Eq. (7)과 Eq. (8)을 통해서 구할 수 있다(Aadnoy & Djrhuus, 2008).
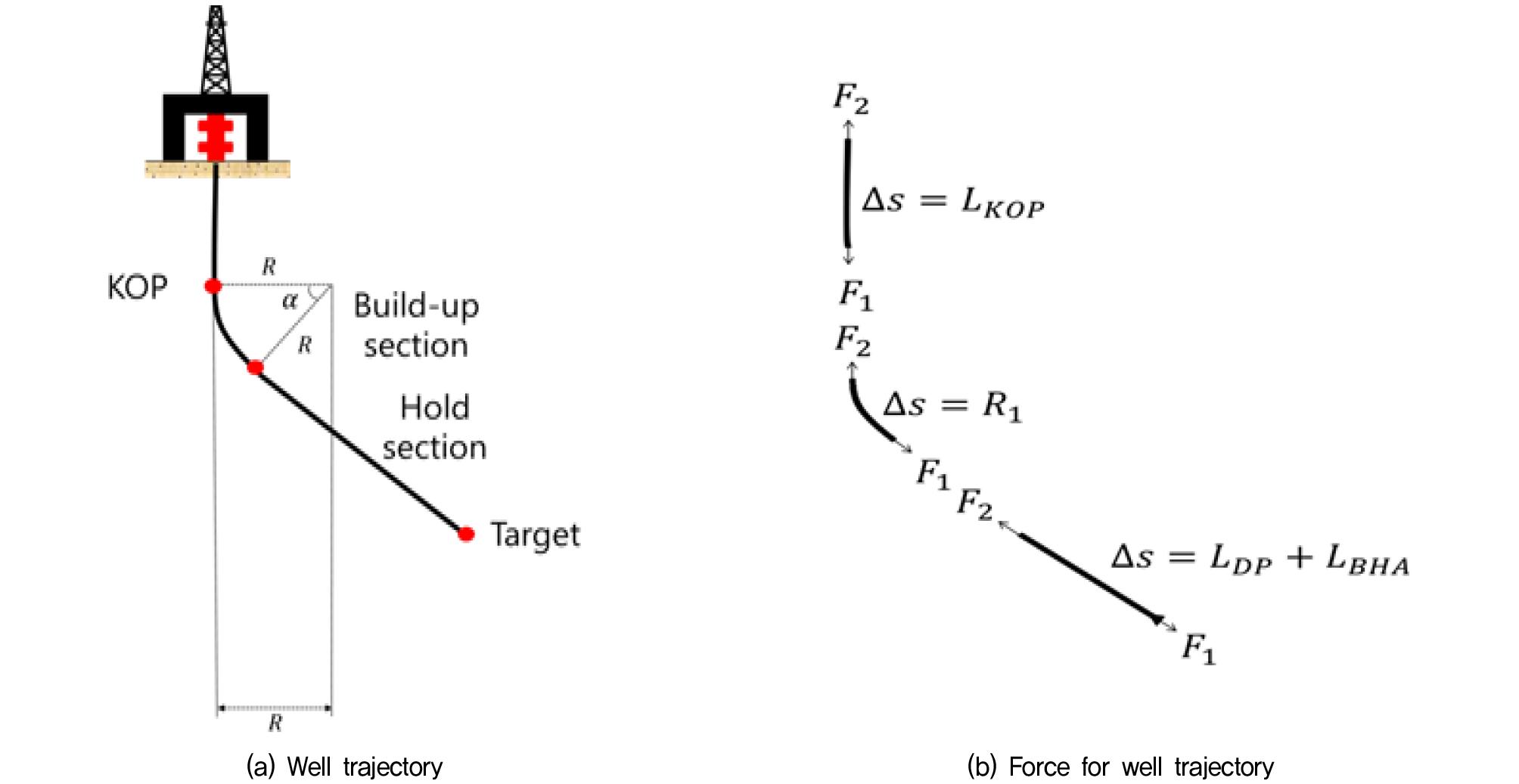
여기서, F2 : 구간 하단에서의 힘(force at top of section)
F1 : 구간 상단에서의 힘(force at bottom of section)
α2 : 곡률구간 시작점의 경사(inclination of radius section start point)
α1 : 곡률구간 끝점의 경사(inclination of radius section end point)
k : sign contant
여기서, 이고, k는 드릴스트링의 수직항력의 변화에 따른 부호를 나타내며, 수직항력의 변화가 0 이상이면 1, 0보다 작으면 -1이 된다. 이번 분석에 사용된 빌드업 구간과 홀드구간의 분포하중에 대한 식을 정리하면 Table 3과 같다.
Table 3.
Torque and drag for build-up and hold section
실제 시추 궤도상에서는 빌드업 구간에서 방위각이 변화되어 사이드밴드구간과 동시에 나타나는 경우가 발생한다. 이러한 경우 빌드업 구간의 분포하중과 사이드밴드구간의 분포하중을 각각 계산하여, Eq. (10)과 같이 합성하여, 3차원 구간에서의 최종적인 분포하중을 계산할 수 있다(Aadnoy & Anderson, 2001).
여기서, F : 시추관에 발생하는 드래그(drag along drill pipe)
Fbu : 빌드업 구간의 드래그(drag of build-up section)
Fsb : 사이드밴드 구간의 드래그(drag of side-bend section)
T : 토크(torque)
Tbu : 빌드업 구간의 토크(torque of build-up section)
Tsb : 사이드밴드 구간의 토크(torque of side-bend section)
3.3 분포하중을 이용한 시추 궤도 설계
위의 내용을 토대로 설계된 시추 궤도 정보를 통하여 각각 구간을 설정하고, 설정된 각 구간에 대한 분포하중을 계산하는 방법에 대하여 설명하였다. 더불어 시추 궤도의 형태의 따른 제한조건 설정에 대한 설명도 하였다. 이를 바탕으로 일반적인 빌드-홀드 형태의 시추 궤도에서 분포하중이 최소로 발생하는 최적의 시추 궤도 설계에 대한 순서도는 Fig. 2와 같다.
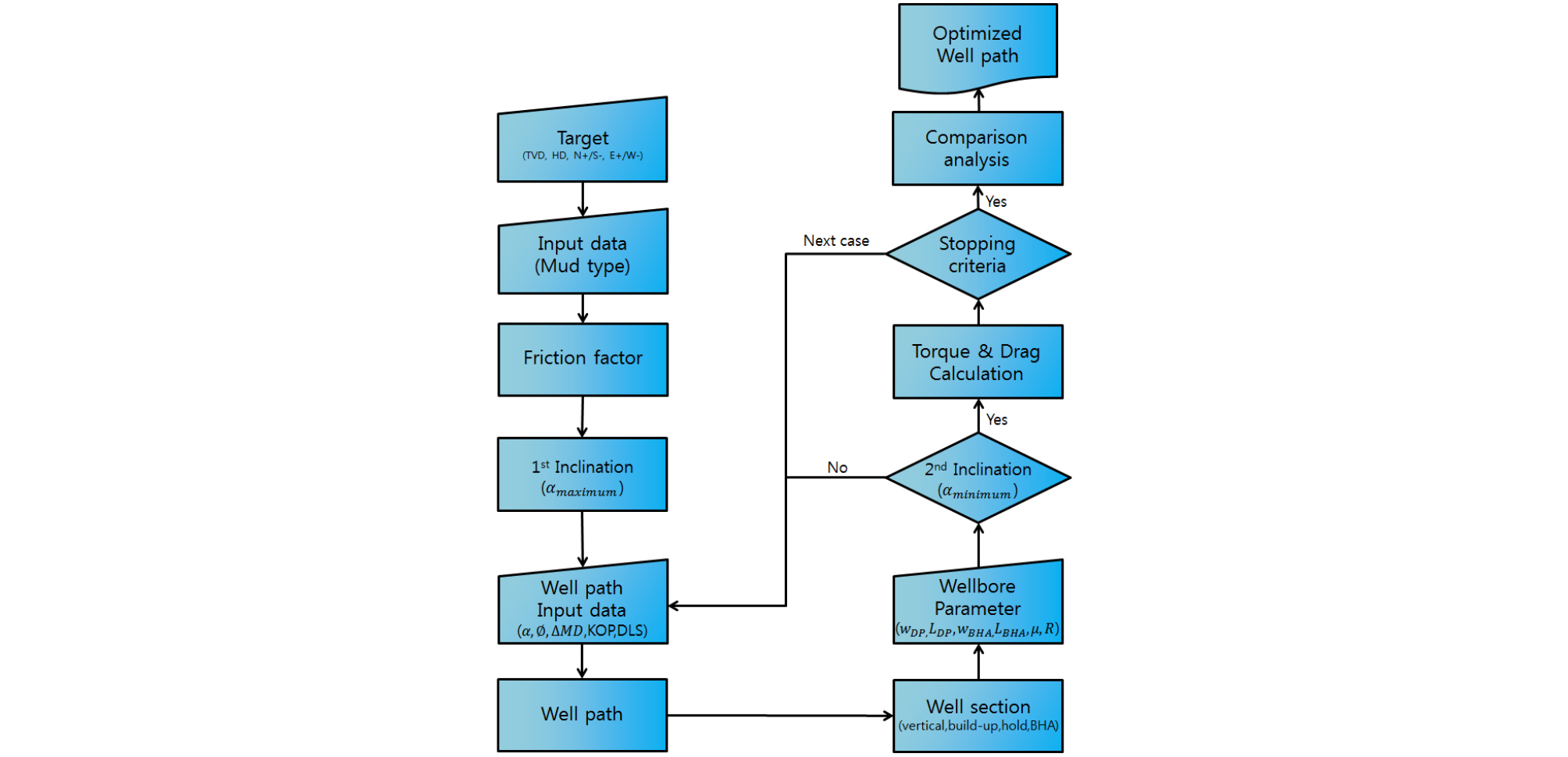
가장먼저 시추 궤도의 목표지점을 결정하고, 시추 궤도에 사용되는 이수 설정하여 궤도 전체의 마찰 계수(μ)와 사용되는 드릴스트링에 적용되는 부력상수(β)를 각각 Table 1과 Eq. (5)를 통하여 계산해 준다. 마찰계수가 결정되면 클롱의 마찰식에 의한 드릴스트링이 하향이 가능한 최대 경사를 결정한 후, 시추 궤도 선정을 위하여 경사, 방위각, 측정 심도, 킥오프 지점 그리고 도그-래그를 결정한다. 결정된 자료들을 토대로 시추 궤도를 선정한 후, 킥오프 지점과 경사를 기준으로 하여 시추 궤도를 수직, 빌드업, 홀드 구간으로 나눠준다. 홀드 구간은 다시 BHA와 드릴스트링의 두 구간으로 나눠준다. 나눠진 구간에 의해서 드릴스트링 및 BHA 단위 중량과 길이, 빌드업 구간의 곡률 반경(R)이 결정된다. 이러한 인자들을 이용하여 드릴스트링 상향 과정에서 최소의 분포하중이 발생하는 최소 경사 값을 구하고, 경사 값이 최대, 최소의 경사 범위에 모두 만족하면 각 구간에 대한 분포하중 값을 계산해 준다. 선정한 모든 궤도에 대한 분포하중 값을 위의 과정을 반복하여 계산하고, 계산된 모든 값을 비교 및 분석 과정을 거쳐 분포하중이 최소로 나타나는 최적의 시추 궤도를 선정한다.
4. 연구결과 및 해석
4.1 시추 궤도 정보
본 연구에서 킥오프 지점, 케이싱유무, 이수의 종류를 변수로 하는 시추 궤도를 선정하기 위해 적용하고자 하는 시추 궤도 정보는 Table 4와 같다. 킥오프 지점은 각각 100m, 200m, 300m로 설정하였고, 이수는 가장 흔히 사용되는 유성이수(OBM, oil based mud)로 설정하여 마찰계수를 결정하였다.
Table 4.
General properties of well trajectories
Table 5의 시추공 자료를 이용하여 최대 및 최소 경사 범위를 설정하여 범위에 적합한 경사를 각 케이스에 대하여 세 가지씩 설정하였다. 시추공 자료는 API(American petroleum Institute)의 드릴 스트링 자료(Gabolde & Nguyen, 2006)와 기존의 Aadnoy와 Anderson(2001)의 분포하중 분석 자료를 바탕으로 하여 설정하였다. 최종적으로 설정된 총 9가지의 시추 궤도에 대하여 케이싱 유무에 따른 분포하중 값을 비교 분석을 실시하였다. 선정 궤도 중에서 분포하중이 최소로 발생하는 궤도에 대하여 여러 가지 이수에 대한 분포하중 분석을 실시하여 분포하중이 최소인 최적의 시추 궤도를 도출하였다.
Table 5.
Various properties for analytical friction model calculation
4.2 연구해석 결과
본 연구에서 수행한 빌드-홀드 형태의 시추 궤도에 대한 최적 궤도 선정을 실시하였다. 이러한 궤도 형태에서는 BHA 구간과 곡률이 발생하는 드릴스트링 구간에서 가장 많은 분포하중이 발생하기 때문에, 이러한 구간에서 분포하중을 최소화하는 것이 가장 중요하다. 이러한 점을 고려하여 킥오프 지점이 목표지점의 심도와 가까울수록 곡률구간이 짧아지면, 그만큼의 분포하중도 감소할 것으로 예상하였다. 또한 윤활성이 좋은 이수를 사용하여 곡률구간에서 드릴스트링과 시추공벽 사이의 마찰을 최소화하면 분포하중도 최소화될 것으로 예상되었다. Table 6과 Table 7은 이수의 종류를 유성이수로 고정하고, 각각의 시추 궤도에 대하여 케이싱 유무에 따른 분포하중 값을 정리한 것이다.
Table 6.
Variables for calculating analytical friction (Open hole)
Table 7.
Variables for calculating analytical friction (Cased hole)
이러한 분석 값을 그래프화하면 Fig. 3, Fig. 4, Fig. 5와 같다. Fig. 3, Fig. 4, Fig. 5를 살펴보면 케이싱 유무에 상관없이 공통적으로 킥오프 지점이 동일한 경우 경사가 증가함에 따라 분포하중이 감소하는 경향을 볼 수 있었다. 이는 동일한 목표지점에 대한 시추 궤도의 경사 값의 변화를 주기 위해서 설정한 경사가 증가할수록 도그-래그가 감소하였고, 이에 따른 곡률구간이 부드럽게 형성됨에 따라 드릴스트링 구간에서 그만큼의 분포하중이 감소한 것이다. 또한 킥오프 지점의 심도가 증가함에 따라 평균적인 분포하중 값이 전반적으로 감소하는 것을 알 수 있다. 이는 킥오프 지점의 심도가 증가함에 따라 수직구간이 증가하였고 수직구간은 마찰이 발생하지 않는 완벽한 수직공으로 가정하였기 때문에 그만큼의 분포하중이 감소한 것이다. 하지만 킥오프 지점이 100m, 경사가 76°인 시추 궤도에서 분포하중이 최소로 발생하는 것을 볼 수 있다. 킥오프 지점이 하부로 내려갈수록 곡률구간이 줄어들어 분포하중 값이 감소하는 경향을 보이기는 하지만 도그-래그 현상을 최소화하여 시추 궤도의 곡률구간을 부드럽게 형성하였을 때, 분포하중이 최소로 발생하는 것을 의미한다. 이러한 결과를 바탕으로 하여 킥오프 지점은 최대한 하부로 설정하되 도그-래그 현상을 최소로 설정하였을 때, 분포하중과 시추문제가 최소로 발생하는 최적의 시추 궤도를 설정할 수 있는 것이다. Fig. 3, Fig. 4, Fig. 5를 케이싱 유무에 따라 분포하중 값을 비교 분석하면 공통적으로 드릴스트링의 상향과 토크에 따른 분포하중은 Cased hole이 Open hole에 비해 각각 7.5%씩 감소하는 경향을 보였다. 이는 분포하중이 시추를 진행하는 지층의 거칠기에 영향을 받기 때문에, 케이싱이 설치됨에 따라 마찰계수가 감소하면서 분포하중이 감소하는 것을 알 수 있다. 이에 반해 드릴스트링의 하향과정에서는 15%씩 증가하는 경향을 보였는데, 이는 드릴스트링의 하향은 상향할 때와는 마찰력이 반대로 작용하기 때문에 마찰계수가 줄어들수록 분포하중은 증가하는 것이다. 그러나 드릴스트링의 하향에 따른 분포하중은 상향 시의 분포하중에 비해 상당히 적게 발생하기 때문에 시추과정에서 크게 문제가 발생하지 않는다. 그러므로 시추 궤도의 전체구간에 대하여 케이싱을 설치하였을 때, 시추 문제가 적게 발생하는 것을 알 수 있다.
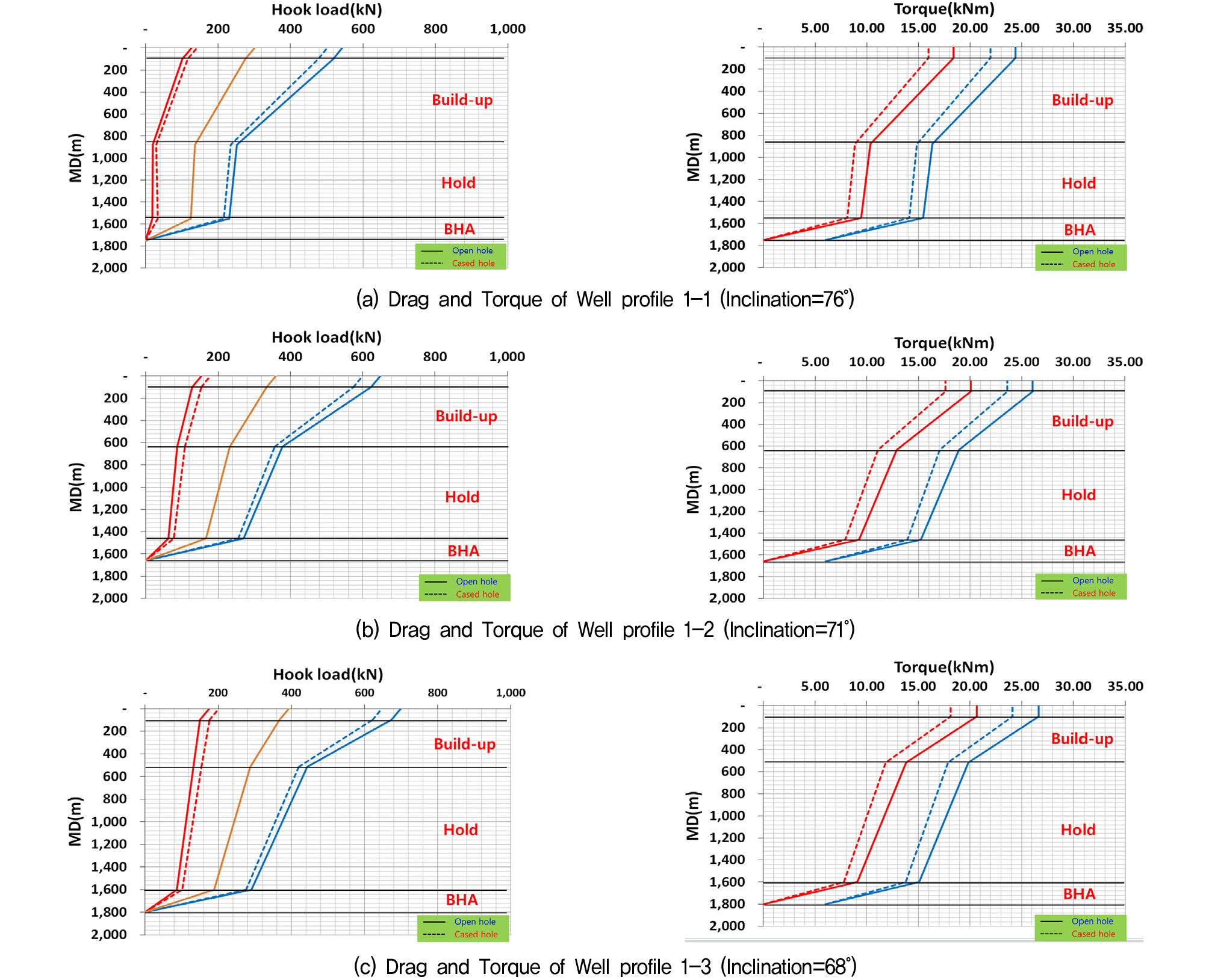
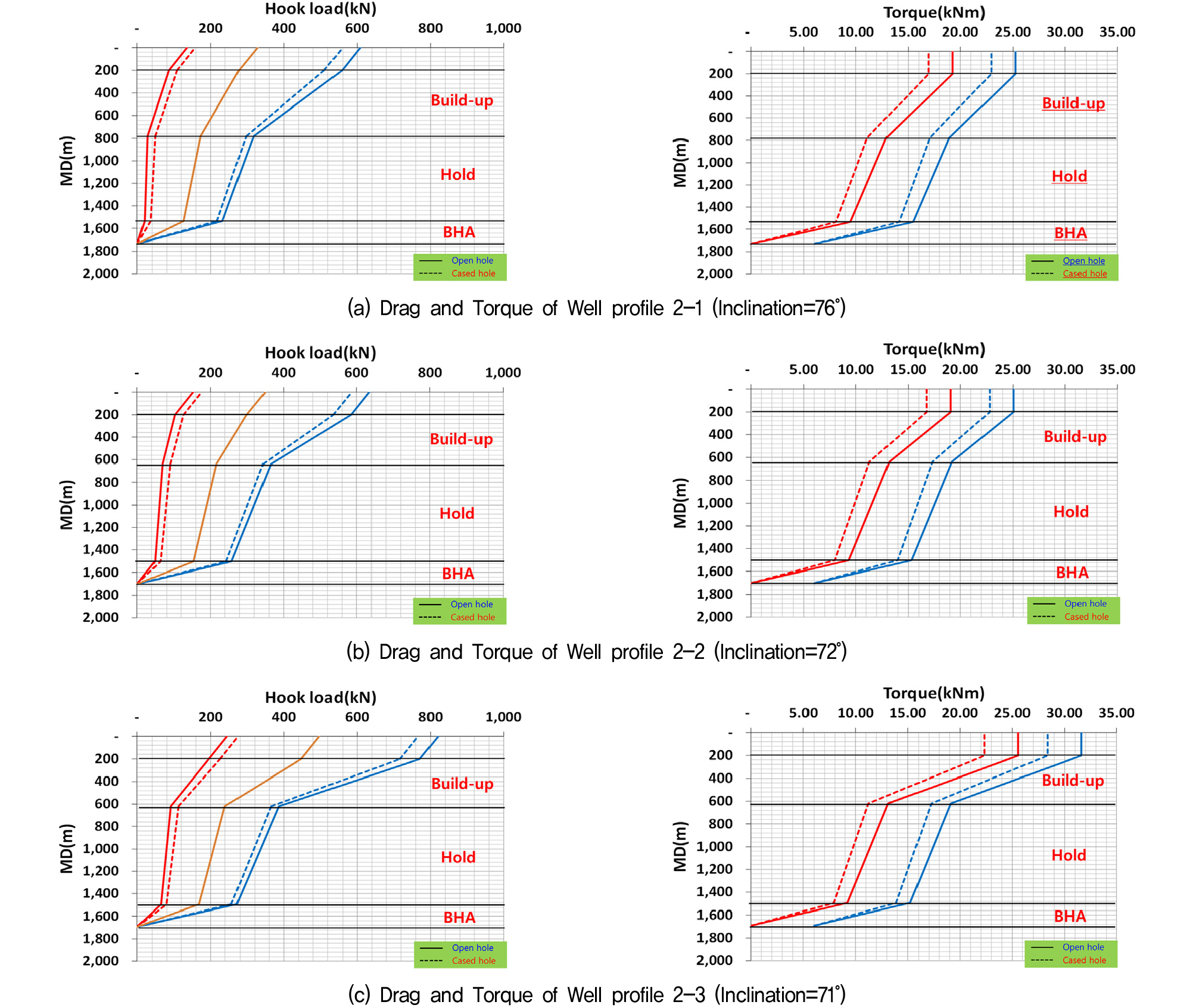
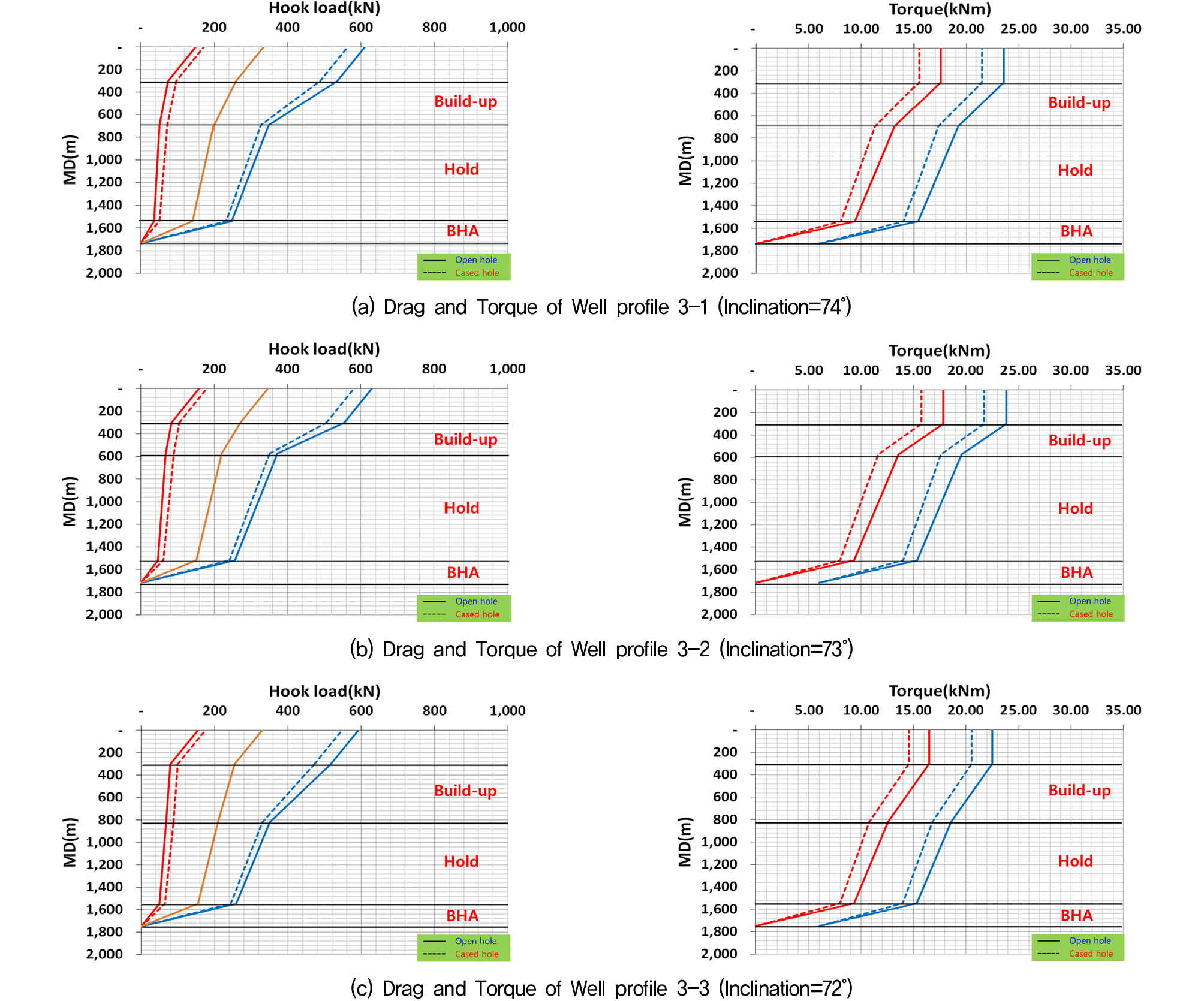
Table 8은 비교 분석을 통하여 최적의 궤도로 선정된 시추 궤도에 대하여 이수 조건에 따라 분포하중 값의 변화를 분석한 것이다. 분석 결과 합성이수(SBM, synthetic based mud)를 이수로 사용하였을 때, 분포하중이 최소로 발생하는 것을 알 수 있다. 합성이수는 윤활성이 좋고 환경영향이 적다는 장점이 있지만 비싼 비용에 따른 비용 증가를 초래하기 때문에, 두 번째로 분포하중이 적게 발생하는 유성이수를 시추 이수로 선정하였다. 최종적으로 킥오프 지점이 100m, 경사가 76°이고, 전체구간에 대한 케이싱을 설치하고, 유성이수를 시추 이수로 사용하였을 때 분포하중이 최소로 발생하는 것을 알 수 있었다.
Table 8.
Analytical friction comparison analysis for mud type
5. 결 론
방향성 시추 작업은 일반 수직 시추 작업보다 시추문제 발생 위험도가 높으며, 시추 궤도를 잘못 선정하여 토크와 드래그가 과도하게 발생하면 시추 시간 지연 및 시추 비용 증가 등의 문제가 발생하게 된다. 따라서 킥오프 지점, 시추 경사, 시추 이수, 케이싱 유무 등에 대한 고려를 통한 시추 궤도를 선정하여 시추 문제를 최소화하여야 한다. 본 연구에서는 킥오프 지점, 케이싱 유무, 시추 이수를 변수로 지정한 후 분포하중 모델링을 이용하여 토크와 드래그를 계산하였고, 고려 변수에 따른 최적 궤도를 도출하였다. 연구 결과는 다음과 같은 결론에 도달하였다.
(1) 킥오프 지점에 따른 분포하중의 영향을 살펴 본 결과 킥오프 지점의 심도가 증가함에 따라 마찰이 발생하지 않는 수직구간이 증가하여 분포하중이 감소하는 경향을 보였다. 또한 동일한 킥오프 지점에서 경사가 증가함에 따라 분포하중이 감소하는 것을 알 수 있었다. 이러한 경향이 나타나는 이유는 경사가 증가함에 따라 도그-래그 값이 감소하여 곡률구간이 부드럽게 형성되었고 그에 따른 분포하중이 감소하는 것을 알 수 있었다.
(2) 케이싱 유무에 따른 분포하중 영향을 살펴보기 위해서 선정된 전체 궤도에 대하여 경사가 발생하는 킥오프 지점 이후의 전체 구간에 대한 케이싱 유무에 따른 분포하중 분석을 실시하였다. 분석 결과 케이싱을 설치했을 때 드릴스트링과 시추공벽 간의 마찰이 감소하여 분포하중이 감소하는 것을 알 수 있었다. 그러나 드릴스트링의 하향과정에서는 케이싱을 설치했을 때 분포하중이 증가하는 경향을 보였는데, 그 이유는 드릴스트링에 발생하는 마찰력이 드릴스트링이 향하는 방향과 반대로 적용됨에 따라 마찰계수가 줄어들면 분포하중은 그에 반해 증가하는 것을 알 수 있었다.
(3) 킥오프 지점과 케이싱 유무에 따라 선정된 최적의 시추 궤도에 대하여 이수의 종류에 따른 분포하중의 영향을 살펴 본 결과 합성이수를 사용하였을 때, 분포하중이 최소로 발생하는 것을 알 수 있었지만 비싼 비용에 의해서 그 다음으로 분포하중이 적게 발생하는 유성이수를 시추 이수로 선정하였다.
이러한 결과를 토대로 실제 시추 작업 이전에 시추 문제를 최소화할 수 있는 최적의 시추 궤도 선정에 활용할 수 있다. 다시 말하면, 킥오프 지점, 케이싱 유무, 이수 등의 고려 변수를 설정한 여러 가지의 시추 궤도에 대한 분포하중 분석을 통하여 목표심도가 까지 안전하게 시추할 수 있는 시추 궤도를 선정할 수 있는 것이다. 그러나 본 연구에 사용된 분포하중 모델링은 실제 시추 조건과 다르게 비트의 방향 전환에 따른 비틀림(Tortuosity) 현상, 지층 조건에 따른 구간별 이수 사용, 수직구간에서의 버클링(Buckling) 현상을 고려하지 않는다. 이러한 현장 조건까지 고려한 분포하중 모델링이 개발된다면 실제 현장에 더욱 적합하고 정확한 분포하중 모델링이 가능하게 된다.
